
 卓智機器人
卓智機器人
本案為國立高雄科技大學(第一校區)機電工程學系 2022 的碩士論文研究成果,筆者因有幸應邀擔任畢業口試委員,有機會了解台灣學術界在機器手臂研磨方面的研究與進展,並有感國立高雄科技大學校師生團隊在此領域的努力與貢獻,遂將全案研究可公開部份在此紀錄,希能分享學術界的智慧,促進台灣產業的升級,以提升國家競爭力。
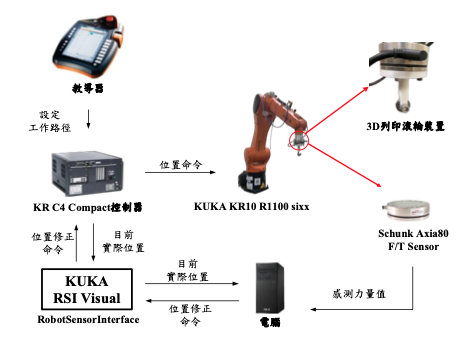
系統使用 KUKA KR6 R900 機器手臂,並在機器手臂法蘭上,裝上一隻力覺感知模組,藉以感知並傳送力量的訊號到控制器內,同時以一部工業電腦 負責演算及設定相關參數、改變整體系統轉換函數 Transfer function,藉以控制機器手臂的位置修正,達到機器手臂法蘭上的工具,以固定力量輸出進行研磨運動。
系統架構圖:
系統轉換函數 Transfer Function:
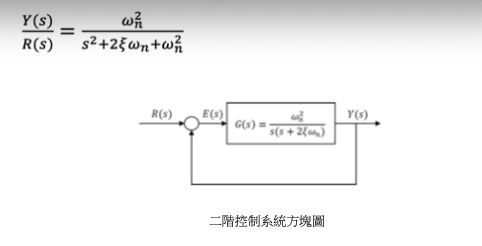
Where
wn : 自然頻率 Natural Frequency
š : Damping Ratio
經過系統參數最佳化設計及分析後,找出本系統最適合的Transfer function,並以實驗驗證結果如下:
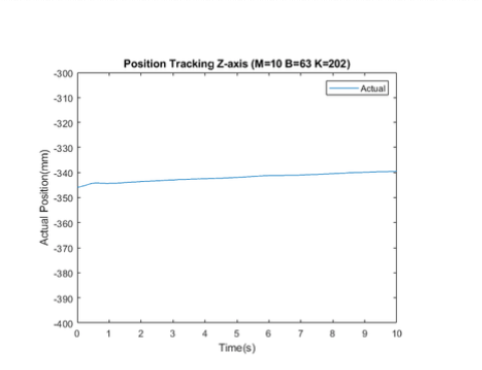
最佳參數組合實驗驗證結果:機器手臂工件實際位置 Vs. 時間
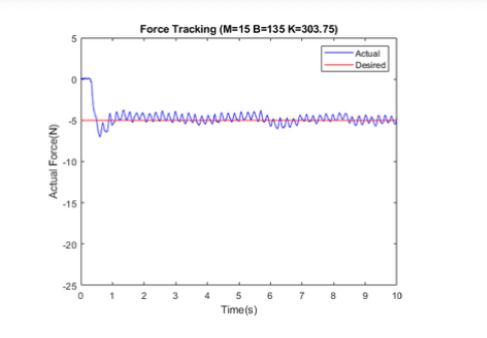
最佳參數組合實驗驗證結果:機器手臂工件實際接觸力 Vs. 時間
該研究結果顯示:
- 機器手臂與研磨表面首次接觸瞬間,施力過衝可控制在 4 Newton 以內。
- 首次接觸工件表面後 0.8 秒,機器手臂即可進入追蹤狀態,並維持穩定接觸,未脫離接觸面。
- 經過最佳化設計,可以找出最佳 Transfer Function 並控制 6 軸機器手臂施力在期望值的正負 1.5 Newton 以內,顯示機械手臂能夠穩定並且有效的追蹤期望接觸力。
本案研究成果提供了一個真實數據的曲線資料,讓 6 軸機器手臂力量控制,不再停留於抽象的經驗認定,同時,也驗證了以改變二階標準控制系統的Transfer function 的控制方式,確實可以做到 6 軸機器手臂有效追蹤期望接觸力的功能,並提供一個最佳化的控制設計,對研磨產線實務的應用,有著非常重要的意義與價值。
主要設備:
機器手臂: KUKA KR6 R900
Force Sensor: Schunk Axia80 F/T Sensor
KUKA RSI: RobotSensorInterface
Personal Computer
系統整合:國立高雄科技大學第一校區機電工程系
KUKA RSI 技術支援:卓智機器人Wise Tech Robot