

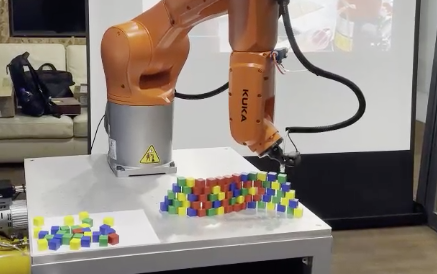
彩繪牆面積木自動堆疊取放、整列系統(點選圖片,可觀看影片)

亞洲大學設計學院室內設計系創客中心
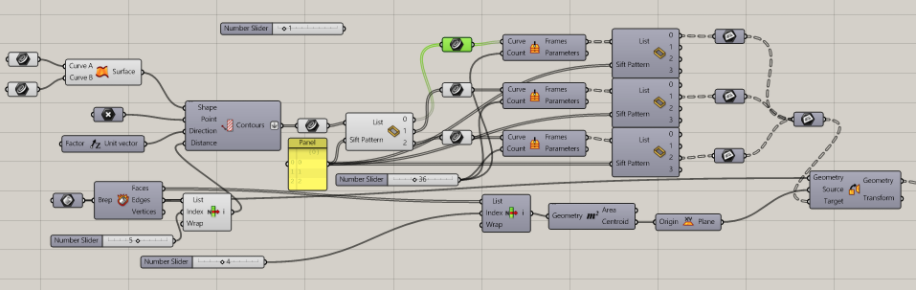
Grasshopper 程式
透過Rhino 及Grass hopper 軟體設計,將室內空間所要堆砌的彩繪牆面,以機器手臂完成實際堆砌工作,驗證使用機器手臂協助室內設計中執行最耗費人力的堆疊工作的可行性。
設計師在Rhino 3D空間中所設計、建模的物件,依照顏色配置、曲面弧度所產生的不同視覺效果,進行電腦模擬,然而這只是用平板螢幕的視角去模擬設計,真實的視覺感官,還是需要靠人力或機具,把真實的物件堆疊後,才能確認。因此,使用等比例的縮小模型,用真實的3D空間視角,去體驗並推估實際的效果,變成為設計工作中,不可或缺的重要步驟。
本系統使用機器手臂對等比例縮小的物件,進行堆砌組合,讓設計師可以在電腦內進行模擬設計,再用機器手臂完成堆砌,體驗等比例縮小物件堆疊後的實際效果,然後再回到電腦內修改設計、重做機器手臂堆疊,反覆來回作業,直到完成作品,這樣的系統讓設計師不需浪費大量的人力、時間去做堆砌的工作,可以全心投入設計工作,縮短時間,儘早完成作品。
主要硬體設備: KUKA KR6 R900-2、CCD、夾治具
軟體: 2D識別軟體、Rhino+Grass hopper、卓智機器人路徑轉換軟體(功能等同 KUKA/PRC)
機器手臂系統: 亞洲大學設計學院室內設計系創客中心
A. KUKA KR6 R900-2
B. KR C4 Compact Controller
軟體設計:
Rhino+Grass hopper 軟體設計: 亞州大學設計學院室內設計學系 施勝誠教授
機器手臂路徑轉換軟體: 卓智機器人
卓智機器人CCD 影像處理軟體: 卓智機器人
系統整合:卓智機器人Wise Tech Robot