

這是一個裝滿強酸、強鹼的化學桶,每桶重達百餘公斤,當機台(CELL)內的化學桶用完時(因化學液會不斷的被抽送到產線使用),工作人員必須從倉儲區把新桶搬運出來替換,因為重量重、桶內又是充滿腐蝕性的強酸、強鹼,讓整個換裝工作,充滿極高的危險性,過去也曾傳出嚴重工安意外,所以業主經常是把這項工作外包,由包商派員駐廠作業,但不管如何委外,最終要來面對這項工作的還是人,因為高危險性,願意從事這樣工作的人越來越少,另一方面,業主也不願再看到因工安事故、人員傷亡的負面報導,造成公司整體形象的傷害,因此,如何把這項工作,變成無人的自動換裝系統,便成了許多大廠亟欲解決的重要課題,這也是卓智機器人,接案執行這項自動化工程的緣起。
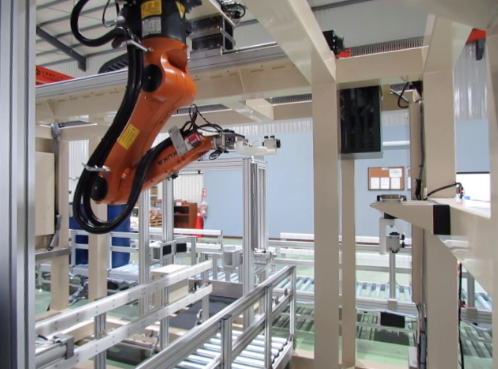
開發這套自動化系統,有許多問題必須克服,首先,受限於現有廠房的空間架構,機器手臂進入機台(CELL)的作業空間已經非常有限,加上法蘭上的夾爪及ATC模組,讓整個作業的自由度又限縮不少,根本沒加裝Force Sensor的餘地,因此如何偵測化學桶上的接管、安全蓋是否確定旋緊?是否已經被轉鬆可以取出來?這是首要克服的問題。再來是,化學桶的兩個開口位置公差太大,必須用CCD進行孔位拍攝確認,但最大的問題是,孔位開口位置的水平平整度不一,機器手臂插入接管或安全蓋的角度,已經不再是固定垂直水平面90度的方向插入,而必須採用一個未知的角度插入,這個問題也必須由CCD 所獲得的影像來進行處理,判斷出水平傾斜的角度,另外由於化學桶兩個安全蓋開口距離相差頗大,加上機台內部作業空間限制,單一固定CCD 無法擷取大範圍影像,因此設計上,CCD掛載於機器手臂上,由手臂移動鏡頭,到不同部位拍攝所需之影像區域。
Simulation: WT RobotSim
整合設備: ATC、入料輸送帶、出料輸送帶、旋轉平台、氣壓缸、閘門、Smart Camera Microscan MV-40
機器手臂: KUKA KR 10 R1100
控制器: KR C4
中控: 卓智機器人Wise Tech Robot
手臂程式: 卓智機器人Wise Tech Robot
機構、夾爪: 台中一明機械
Level: intelligent control