
 卓智機器人
卓智機器人
限於商業機密,本主題僅展示以下螺絲鎖付圖片
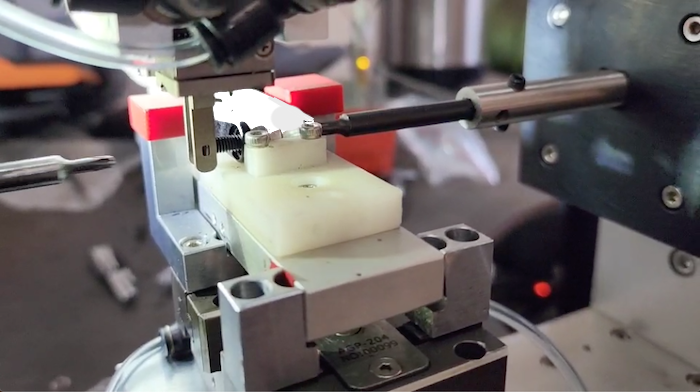
機器手臂夾取螺絲、等待伺服螺絲起子進行鎖付
機器手臂執行類似瑞士刀的自行車手工具組裝,所需要的主要動作高達22個步驟以上,是一項極為複雜且挑戰性相當高的工程,尤其是刀具間都須夾帶著微型的波浪華司,大大增加了本案自動化組裝的困難度,系統內規劃2隻機器手臂進行組裝作業,並由其中一隻機器手臂的控制器 KUKA KRC4 負責工作站流程管控(中控),週邊設備包含夾爪X3、螺絲震動桶X2、伺服滑台X2(EtherCAT 通訊協定)、伺服螺絲起子X2(EtherCAT 通訊協定)、氣動旋轉平台等,系統內2套機器手臂之間的通訊採Ethernet TCP/IP 通訊協定,而中控(KUKA KRC4 控制器)與4套伺服馬達之間的通訊則是直接使用EtherCAT通訊協定來執行,其餘週邊設備及各式感測器與中控(KUKA KRC4 控制器)使用IO通訊,總計IO點位高達69點,本案工程由卓智機器人規劃執行,目前(2023.01.11)初步測試結果每組手工具組裝約需110秒,未來經過手臂、馬達運動速度、性能調校後(Tunning)後,預估可以達到每組100秒以下的產能。
系統規格:
A. 具備瑞士刀、自行車手工具自動化組裝功能
B. 組裝速度:< 110秒/組
C. 中控系統:KUKA KRC4
D. 機器手臂控制器與伺服馬達採EtherCAT 通訊協定
E. 機器手臂之間的通訊採用Ethernet TCP/IP通訊協定
系統架構:
A. KUKA KR20-3 X1 ,KUKA KR6 R900 X1
B. 夾爪X3
C. 螺絲震動桶X2
D. 伺服滑台X2 (EtherCAT 通訊協定)
E. 伺服螺絲起子X2 (EtherCAT 通訊協定)
F. 氣動旋轉平台
機構設計、製作: 仕鐽精機科技有限公司
系統整合:卓智機器人Wise Tech Robot