卓智機器人首頁
討論區首頁
問答集
搜尋
沒有回覆的主題
最近討論的主題
登入
沒有回覆的主題
最近討論的主題
台灣機器人資訊平台 Stand With Ukraine
台灣機器人資訊平台由卓智機器人完全贊助提供/ Sponser: Wise-Tech Robot, Taiwan
技術支援
搜尋
卓智機器人首頁
討論區首頁
新聞與公告
科技新知
轉動慣量的說明與計算
關於機器人的新聞及機器手臂相關應用
回覆文章
列印模式
搜尋
進階搜尋
1 篇文章 • 第
1
頁 (共
1
頁)
kiwi wu
文章:
324
註冊時間:
2016年 2月 4日, 13:05
轉動慣量的說明與計算
引言
文章
由
kiwi wu
»
2021年 10月 28日, 12:57
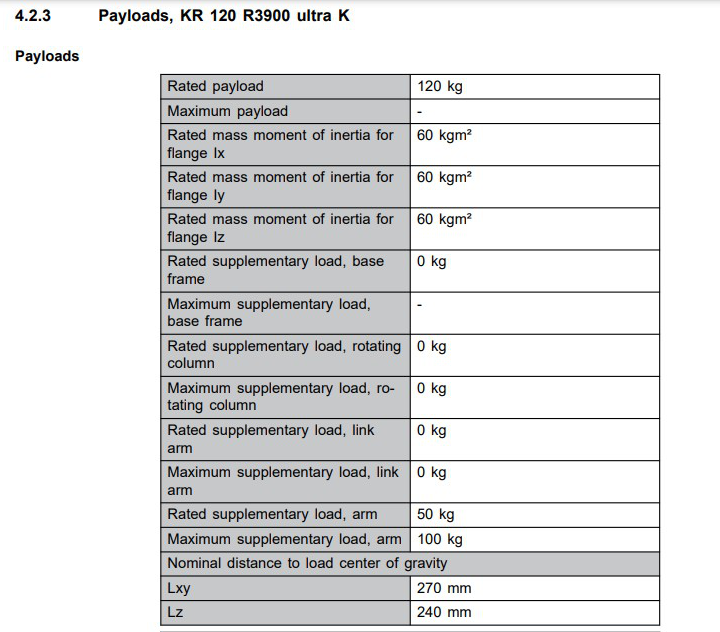
機器手臂抓取重物時,除必須考慮能夠承受夾治具及重物的重量負載外,另一個重要的因素,就是質量轉動慣量 Mass Moment of inertia,亦即需考量機器手臂在法蘭面上的X,Y,Z 三個軸向上,額定的質量轉動慣量Ix、Iy、Iz 能否克服轉動夾治具及重物所需的質量轉動慣量,進而對重物依所選軸向進行旋轉。
而機器手臂在法蘭面上三個軸向上的額定質量轉動慣量,可以透過原廠的技術手冊獲得(如下圖),但夾治具及重物的質量轉動慣量,則需要依據所旋轉的軸向、物體形狀、質量分佈去進行計算,因此相對複雜,以下網頁針對不同軸向、不同形狀的物體的質量轉動慣量,提供了一個很好的說明與計算,值得參考:
Khan Academy: Moment of inertia
線上影片
example: KUKA KR120 R3900 Rated Moment of Inertia
回頂端
回覆文章
列印模式
1 篇文章 • 第
1
頁 (共
1
頁)
回到「科技新知」
前往
硬體
↳ KUKA
↳ YASKAWA
↳ ABB
↳ FANUC
↳ HIWIN、TM、DELTA、NACHI、EPSON、KAWASAKI
軟體
↳ 機器人視覺技術/ Robotic Vision Tech
↳ 機器人力覺技術/ Robotic Force Sensing Tech
↳ WorkVisual
↳ Robotmaster
↳ Grass Hopper KUKA|prc
↳ RobotSim 卓智機器手臂模擬軟體
新聞與公告
↳ 活動公告
↳ 科技新知
↳ 推薦與站務