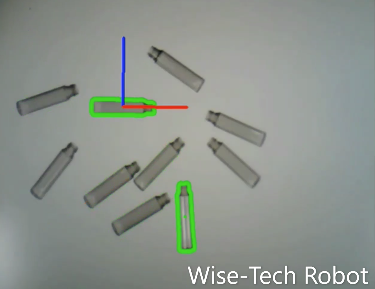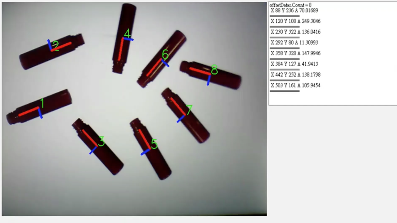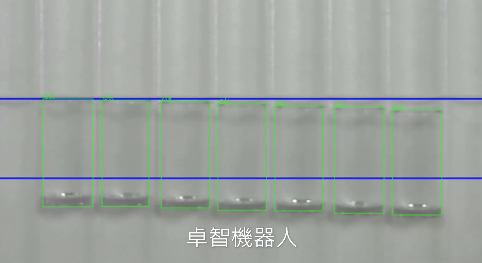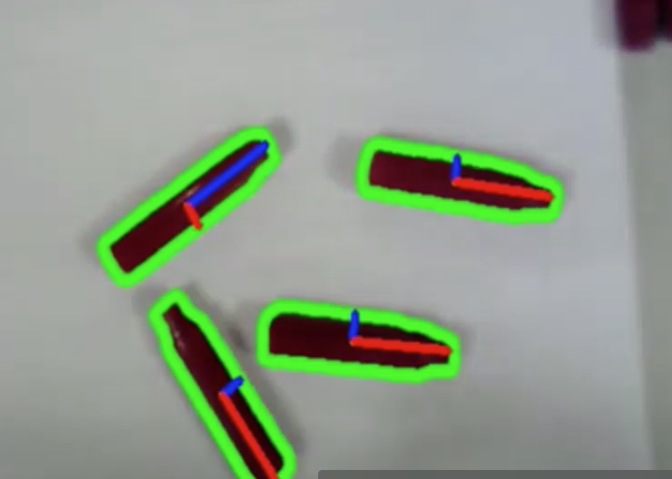
Before using robot to pick up those randomly separated bottles, we need to recognize the position and orientation for each bottle. Here we show how fast of the recognition speed with a usual camera and the image processing software developed by Wise-Tech Robot.
系統架構:
A. KUKA KR3
B. KR C4 Compact Controller
C. NoteBook
D. KUKA EKI
E. A usual Camera with USB interface
F. Image processing software developed by Wise-Tech Robot/ 卓智機器人影像識別軟體
程式開發:卓智機器人
測試地點: 卓智機器人測試中心
應用:Pick and place