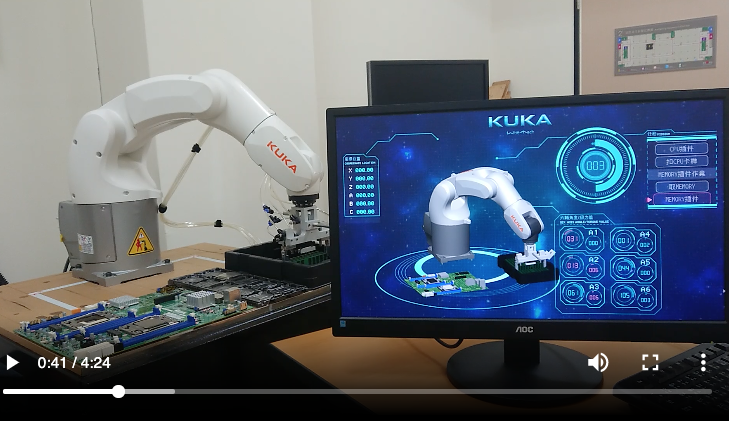
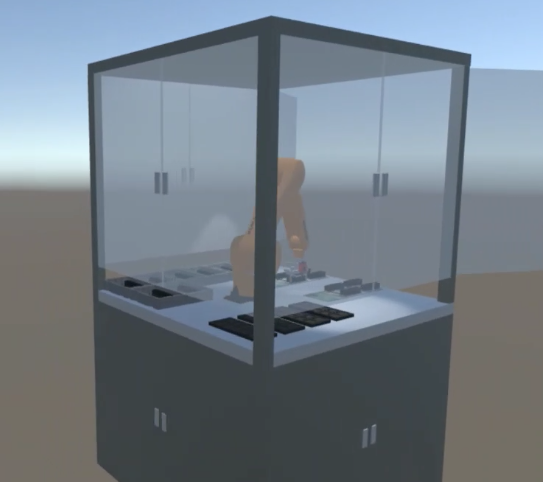
WT RobotSim real-time simulation for Industrial PC motherboard assembling, where Robot controller remote controls PC simulator through Ethernet.
Source: Wise-Tech Robot
Robotics Simulator: WT RobotSim
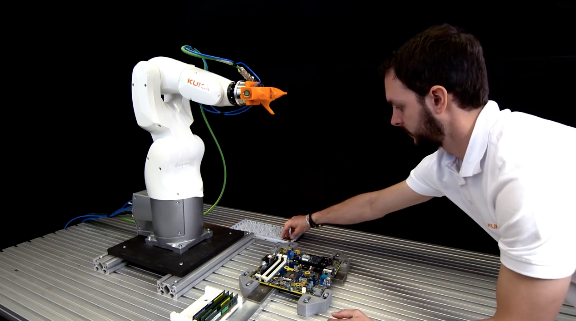
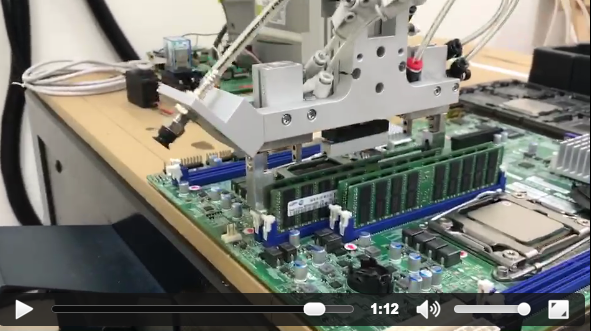
Automated PC board assembling system
The system provide a total solution for a complicate motherboard assembling job, where robot should take CPU plastic cover away, unlock levers, place CPU module on socket, lock the CPU, and insert memory cards to sockets. The system applys KUKA force-sensing software techniques to detect the abnormal force when assembling, which provides more reliable and more stable processing for the assembling job.
Equipments:
KUKA KR3, PC, gripper
Features:
1. Cycle time < 32s
2. Be capable of handshaking with MES
3. Providing real-time status of work station
4. Available for different kinds of automatic feeding and discharging equipment

 卓智機器人
卓智機器人