Tray 盤取放堆疊力覺感知應用
發表於 : 2020年 6月 18日, 10:05
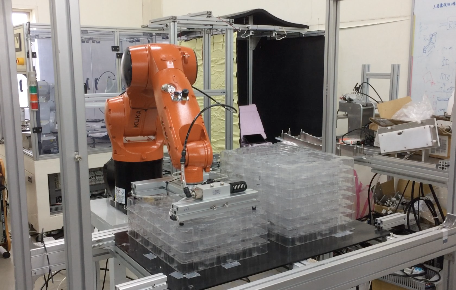
KUKA機器手臂Tray 盤取放堆疊力覺感知應用
力覺是機器人除了視覺以外,最重要的感知部分,其應用的場域甚廣,如確認來料高低、感測記憶卡或匯流排插件力道、CNC五金工件取放卡料檢知等,都需要提供機器手臂力量資訊,確保作業安全及產線的穩定投產。機器人系統整合公司卓智機器人獨立開發的力覺感知軟體套件,可直接安裝在KUKA機器手臂控制器內,不需採購任何Force Sensor硬體設備,工程師當日安裝、設定、測試,當日即可投產應用,簡單、快速、安全,且免去外掛硬體的定期維護或損壞的困擾。
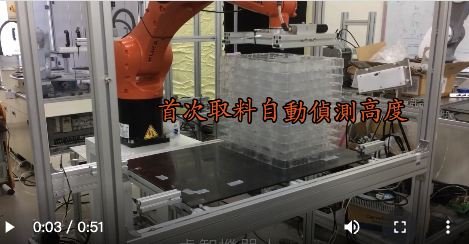
以下影片即是使用機器手臂力覺軟體來感測來料深度再進行吸取,同時也會判斷堆疊高度,然後再依據現有高度向上堆疊的應用!
規格:
1. KR6 最小感測力量:~9N
2. Sensing Update Rate < 20ms
3. XYZABC軸向力覺感知
3. 內建軟體,無需外接任何設備
Software: Wise-Tech Robot
機器手臂:KUKA KR 6 R700
控制器: KR C4 compact
機器手臂力覺軟體:卓智機器人Wise Tech Robot
力覺是機器人除了視覺以外,最重要的感知部分,其應用的場域甚廣,如確認來料高低、感測記憶卡或匯流排插件力道、CNC五金工件取放卡料檢知等,都需要提供機器手臂力量資訊,確保作業安全及產線的穩定投產。機器人系統整合公司卓智機器人獨立開發的力覺感知軟體套件,可直接安裝在KUKA機器手臂控制器內,不需採購任何Force Sensor硬體設備,工程師當日安裝、設定、測試,當日即可投產應用,簡單、快速、安全,且免去外掛硬體的定期維護或損壞的困擾。
以下影片即是使用機器手臂力覺軟體來感測來料深度再進行吸取,同時也會判斷堆疊高度,然後再依據現有高度向上堆疊的應用!
規格:
1. KR6 最小感測力量:~9N
2. Sensing Update Rate < 20ms
3. XYZABC軸向力覺感知
3. 內建軟體,無需外接任何設備
Software: Wise-Tech Robot
機器手臂:KUKA KR 6 R700
控制器: KR C4 compact
機器手臂力覺軟體:卓智機器人Wise Tech Robot