播放前、小心音響!
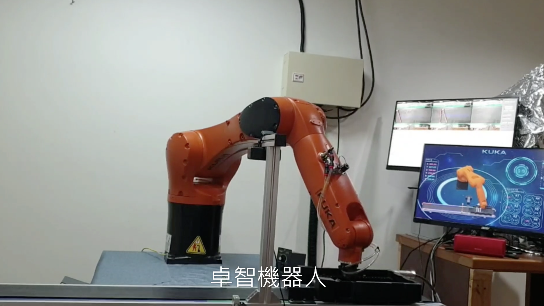
輸送帶螺絲自動取放、整列系統
機器手臂可同步追蹤動態輸送帶工件,並依據影像擷取處理結果,將工件按照其位置、角度取出,並整列於TRAY盤內,如遇夾取時工件異位,使夾爪撞擊工件,系統自動感測異常後,放棄該工件處理(列為NG),並繼續執行後續來料工件、不停機,達成穩定投產目標。系統適合於各種動態運轉工件之加工處理自動化作業。
主要設備及軟體:KUKA KR6 R900、CCD、夾治具、機器手臂2D識別軟體
規格:
- A. 可同步追蹤輸送帶工件
- B. 可辨識各種形狀工件
- C. 辨識速度 >20次/秒
- D. 可即時顯示影像辨識結果
- E. 力覺感測避免夾爪意外擠壓工件
- F. 具備與機器手臂資訊交握功能
- G. 支援Windows 7以上作業系統
A. KUKA KR6 R900
B. KR C4 Compact Controller
C. CCD
D. 卓智機器人影像識別軟體
程式開發: 卓智機器人
測試時間: 2020.07.17
測試地點: 卓智機器人