
有 278 筆資料符合您搜尋的條件
- 2020年 5月 9日, 13:42
- 版面: KUKA
- 主題: KUKA KR 3 使用Leap Motion 執行手勢控制/ Gesture-guided Robot
- 回覆: 2
- 觀看: 7866
Re: KUKA KR 3 使用Leap Motion 執行手勢控制/ Gesture controlled Robot
Similar application as follows but using KUKA RSI instead of EKI for a real-time control: http://www.wtech.com.tw/forum/kuka/mouse_rsi/USC20190319c.png To real-time control Robot remotely, we construct the system as the following procedures: 1. Connect PC/NoteBook through Ethernet to Robot Controlle...
- 2020年 5月 9日, 13:28
- 版面: KUKA
- 主題: RSI 滑鼠即時手臂控制/A mouse-guided KUKA Robot with RSI
- 回覆: 0
- 觀看: 4037
RSI 滑鼠即時手臂控制/A mouse-guided KUKA Robot with RSI
http://www.wtech.com.tw/forum/kuka/mouse_rsi/USC20190319c.png To real-time control Robot remotely with PC mouse, we construct the system as the following procedures: 1. Connect PC/NoteBook through Ethernet to Robot Controller 2. Data exchange between robot controller and PC/NoteBook with UDP/IP pro...
- 2020年 5月 9日, 11:07
- 版面: KUKA
- 主題: KUKA 機器手臂與雄克力覺感知器/Kukka Robot and Schunk force sensor
- 回覆: 0
- 觀看: 3883
KUKA 機器手臂與雄克力覺感知器/Kukka Robot and Schunk force sensor
http://www.wtech.com.tw/forum/kuka/force_sensor_rsi/Schunk_forceSensor.png KUKA 機器手臂與雄克力覺感知器/Kukka Robot and Schunk force sensor Since this type of force sensor doesn't support EthernetCAT interface, we have to construct the system as the following procedures: 1. connect Force sensor to PC/NoteBook...
- 2020年 4月 24日, 11:55
- 版面: KUKA
- 主題: 智慧相機判斷 2D 散亂物體與取放/ Pick and Place for randomly placed 2D objects with smart CCD
- 回覆: 0
- 觀看: 3840

- 2020年 4月 16日, 12:36
- 版面: KUKA
- 主題: KR 3機器手臂主機板組裝作業/ Kuka KR3 for PC Board assembling applications
- 回覆: 10
- 觀看: 23195
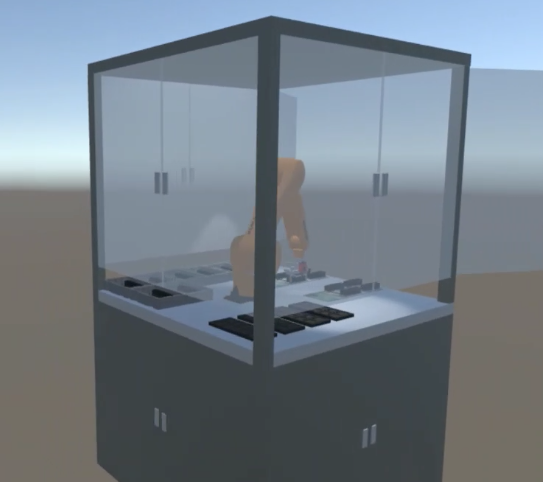
Re: KR 3機器手臂主機板組裝作業/ Kuka KR3 for PC Board assembling applications
Click the picture for another 3D simulation:
- 2020年 4月 15日, 12:02
- 版面: KUKA
- 主題: KUKA 1 部機器手臂負責操做 2部CNC加工/ Pick and Place apls. for CNC
- 回覆: 10
- 觀看: 20620
Re: KUKA 1 部機器手臂負責操做 2部CNC加工/ Pick and Place apls. for CNC
Procedures: 1. Define the customer’s requirements. 2. Determine the suitable robot for the system. 3. Layout the workstation. 4. Design the gripper with electromagnet to rule out the stuck piece inside the vibration feeder. 5. Apply Wise-Tech Robot special technique to detect the abnormal force when...
- 2020年 4月 15日, 12:02
- 版面: KUKA
- 主題: KUKA 1 部機器手臂負責操做 2部CNC加工/ Pick and Place apls. for CNC
- 回覆: 10
- 觀看: 20620
Re: KUKA 1 部機器手臂負責操做 2部CNC加工/ Pick and Place apls. for CNC
Technical Challenges: 1. Robot should serve two CNC machines. 2. If workpiece has problem to be inserted to CNC collet chuck, robot should stop and retry with different angle, otherwise CNC collet chuck will be broken. 3. If workpiece has problem to be pulled out of CNC collect chuck, robot should s...
- 2020年 4月 15日, 12:02
- 版面: KUKA
- 主題: KUKA 1 部機器手臂負責操做 2部CNC加工/ Pick and Place apls. for CNC
- 回覆: 10
- 觀看: 20620
Re: KUKA 1 部機器手臂負責操做 2部CNC加工/ Pick and Place apls. for CNC
Title: The automatic CNC tool machining system Customer: StarWinn Background: In this workstation the workpiece in the vibration feeder as Fig. D-1 need to be picked up and put into CNC for machining. Since the workstation with two CNC machines runs 24/7 for whole year, it takes a lot of manpower to...
- 2020年 4月 15日, 11:55
- 版面: KUKA
- 主題: KUKA KR6 機器手臂微小開關電測、噴印自動化/ Mini-switch electrical testing and printing apls.
- 回覆: 12
- 觀看: 17631
Re: KUKA KR6 機器手臂微小開關電測、噴印自動化/ Mini-switch electrical testing and printing apls.
Procedures: 1. Define the customer’s requirements 2. Design gripper A to grap tray from drawer. 3. Design gripper B to pick mini switch from tray. 4. Design gripper C to pick mimi switch from electric test platform and place into the slider for printing. 5. Design the needle-like pin to switch on an...
- 2020年 4月 15日, 11:54
- 版面: KUKA
- 主題: KUKA KR6 機器手臂微小開關電測、噴印自動化/ Mini-switch electrical testing and printing apls.
- 回覆: 12
- 觀看: 17631
Re: KUKA KR6 機器手臂微小開關電測、噴印自動化/ Mini-switch electrical testing and printing apls.
Technical Challenges: 1. Robot should have needle-like tool to turn on or turn off the switch precisely. 2. Robot should load the tray from drawer as Fig. C-2 and unload it on the working table. 3. The system has to deal with three difference type of mini switch. They are 2-pin、4pin and 6-pin mini s...