
有 280 筆資料符合您搜尋的條件
- 2019年 7月 28日, 11:39
- 版面: KUKA
- 主題: KUKA 手臂每年保養項目/ KUKA Robot Maintenance Content
- 回覆: 8
- 觀看: 11312
Re: KUKA Robot Maintenance Content/ KUKA 手臂保養項目
2019 KUKA non-Agilus robot Maintenance Content/ KUKA 非Agilus 手臂保養項目 E. 2019 Minor electrical maintenance KRC4/初級電器維護 KRC4 1. Clean heat exchanger(in the cleanroom, this item will depend on actual environment conditions) /清潔熱交換器(無塵室場合需視現場狀況而定) 2. Cleaning cooling elements of drive components(in the c...
- 2019年 7月 28日, 11:38
- 版面: KUKA
- 主題: KUKA 手臂每年保養項目/ KUKA Robot Maintenance Content
- 回覆: 8
- 觀看: 11312
Re: KUKA Robot Maintenance Content/ KUKA 手臂保養項目
2019 KUKA non-Agilus robot Maintenance Content/ KUKA 非Agilus手臂保養項目
D. 2019 Main axis maintenance/主軸保養
1. Oil exchange of main axis gear units(depending on the robot type)/ 更換手臂主軸齒輪油(依據手臂不同型號更換齒輪油)
2. Inspection of the motor and gear shaft axis 1 to 3/ 檢查A1˜A3馬達及傳動軸(與客戶討論是否施行)
D. 2019 Main axis maintenance/主軸保養
1. Oil exchange of main axis gear units(depending on the robot type)/ 更換手臂主軸齒輪油(依據手臂不同型號更換齒輪油)
2. Inspection of the motor and gear shaft axis 1 to 3/ 檢查A1˜A3馬達及傳動軸(與客戶討論是否施行)
- 2019年 7月 28日, 11:37
- 版面: KUKA
- 主題: KUKA 手臂每年保養項目/ KUKA Robot Maintenance Content
- 回覆: 8
- 觀看: 11312
Re: KUKA Robot Maintenance Content/ KUKA 手臂保養項目
2019 KUKA non-Agilus robot Maintenance Content/ KUKA 非Agilus手臂保養項目
C. Wrist maintenance/手腕軸保養
1. Oil exchange of the wrist axis gear units(depending on the robot type)/ 更換手腕軸齒輪油(依據手臂不同型號更換齒輪油)
2. Exchange of the toothed belt(depending on the robot type)/ 更換齒形皮帶(依據不同手臂型式更換)
C. Wrist maintenance/手腕軸保養
1. Oil exchange of the wrist axis gear units(depending on the robot type)/ 更換手腕軸齒輪油(依據手臂不同型號更換齒輪油)
2. Exchange of the toothed belt(depending on the robot type)/ 更換齒形皮帶(依據不同手臂型式更換)
- 2019年 7月 28日, 11:35
- 版面: KUKA
- 主題: KUKA 手臂每年保養項目/ KUKA Robot Maintenance Content
- 回覆: 8
- 觀看: 11312
Re: KUKA Robot Maintenance Content/ KUKA 手臂保養項目
2019 KUKA non-Agilus robot Maintenance Content/ KUKA 非Agilus手臂保養項目
B. Data Back-up with spare SSD/資料備份
1. Creation of back-up image/建立備份
2. Labeling of the storage medium and handover to customer/ 標註硬碟儲存內容
B. Data Back-up with spare SSD/資料備份
1. Creation of back-up image/建立備份
2. Labeling of the storage medium and handover to customer/ 標註硬碟儲存內容
- 2019年 7月 28日, 11:31
- 版面: KUKA
- 主題: KUKA 手臂每年保養項目/ KUKA Robot Maintenance Content
- 回覆: 8
- 觀看: 11312
Re: KUKA Robot Maintenance Content/ KUKA 手臂保養項目
2019 KUKA non-Agilus robot Maintenance Content/ KUKA 非Agilus 手臂保養項目 A. Basic Inspection(1)/基本檢測 (1) 1. Storage of user programs(USB provided by customer)/程式備份(USB由客戶提供) 2. Inspection of running noises/各軸雜訊檢查 3. Checking of joint mastering/機器手臂原點校正 4. Condition check of hose packs, cable tracks and e...
- 2019年 7月 28日, 11:25
- 版面: KUKA
- 主題: KUKA 手臂每年保養項目/ KUKA Robot Maintenance Content
- 回覆: 8
- 觀看: 11312
Re: KUKA Robot Maintenance Content/ KUKA 手臂保養項目
KUKA non-Agilus robot Maintenance Table/ KUKA 非 Agilus 手臂保養週期 A. Basic inspection/基本檢測, yearly B. Data Back-up/資料備份, yearly C. Wrist maintenance/手腕軸保養, 每10,000小時或2年/ every 10,000 hrs or every 2 years D. Main axis maintenance/主軸保養, 每20,000小時或4年/ every 20,000 hrs or every 4 years E. Minor Electrical m...
- 2019年 7月 28日, 11:12
- 版面: KUKA
- 主題: KUKA 手臂每年保養項目/ KUKA Robot Maintenance Content
- 回覆: 8
- 觀看: 11312
KUKA 手臂每年保養項目/ KUKA Robot Maintenance Content
2018 KUKA Agilus robot Maintenance Content/ KUKA Agilus手臂保養項目: A. Basic inspection/基本檢測, yearly B. Data Back-up/資料備份, yearly C. Minor Electrical maintenance/初級電器維護, 每2年/ every 2 years D. Major Electrical maintenance/高級電器維護, 每5年/ every 5 years A. Basic Inspection/基本檢測 1. Evaluation degree of fouling/...
- 2019年 7月 19日, 00:15
- 版面: KUKA
- 主題: KR 3機器手臂主機板組裝作業/ Kuka KR3 for PC Board assembling applications
- 回覆: 10
- 觀看: 23556
Re: KR 3機器手臂主機板組裝作業 Robot PCB assembly
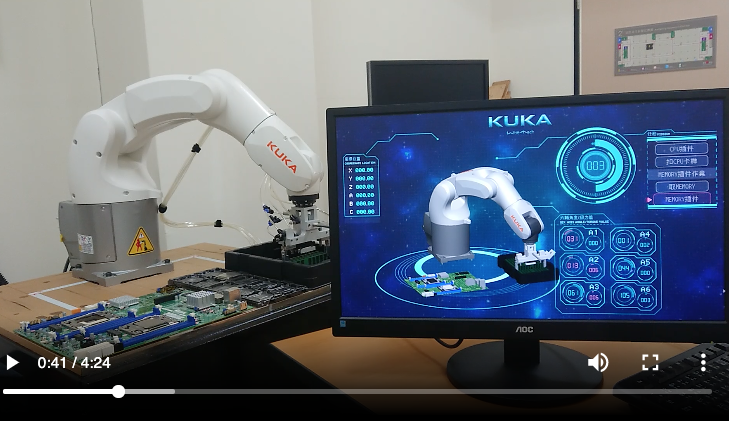
WT RobotSim real-time simulation for Industrial PC motherboard assembling, where Robot controller remote controls PC simulator through Ethernet.
Source: Wise-Tech Robot
Robotics Simulator: WT RobotSim
- 2019年 7月 5日, 12:29
- 版面: KUKA
- 主題: 機械手臂安全檢查表/ Robotic Safety Check List
- 回覆: 3
- 觀看: 12117
Re: 機械手臂安全檢查表
之前常有主包商或客戶跟我們爭論一件事,他們想把進入工站閘門的感測訊號,接到中控電腦,由中控下達指令要求手臂暫停動作,主要是因為這樣做,人員進入工站作業出來後,不需要去做機器手臂解鎖動作(按教導器上的acknowledge確認鍵),簡化了繁瑣的步驟,這個方法看似聰明,但卻充滿潛在性的致命危機。 首先,機器手臂在工站內作業時,是不允許任何人進入的,只要有人闖入,機器手臂必須急停,而且是用機械互鎖(INTERLOCK)的方式,不經過CPU,直接由機器手臂安全系統ESC (Electronic safety circuit)控制急停,因為這是人員誤闖而設下的急停機制,是一種重要而可靠、驗證合格的安全措...
- 2019年 6月 25日, 18:03
- 版面: 科技新知
- 主題: Summit View 600/800 fully automated wafer inspection system
- 回覆: 5
- 觀看: 9729
Re: Summit View 600/800 fully automated wafer inspection system
Similar system form NanoFocus: NanoFocus µsprint: Fully automated wafer inspection
